

Le contrôle de la vitesse des ventilateurs est devenu une préoccupation majeure dans de nombreux domaines, que ce soit pour optimiser le refroidissement des composants électroniques, réduire le bruit dans les environnements sensibles, ou encore gérer la consommation d'énergie. Les ventilateurs modernes, notamment ceux équipés de trois fils, offrent des possibilités de contrôle plus fines que leurs prédécesseurs à deux fils. Cet article explore comment interagir avec un ventilateur à trois fils en utilisant une carte Arduino, en détaillant les principes sous-jacents, les défis techniques et les solutions pour une intégration réussie.
Un ventilateur à trois fils se distingue des modèles plus simples par la présence d'une troisième connexion, souvent dédiée au retour d'information sur sa vitesse de rotation. Il est possible que ce fil soit lié à un système de mesure de vitesse, comparable aux "encodeurs" utilisés dans d'autres applications mécaniques, ou qu'il soit impliqué dans une forme de régulation de vitesse intégrée. Le moteur lui-même est fréquemment de type "brushless" (sans balais), une technologie courante pour le refroidissement des ordinateurs, caractérisée par sa fiabilité et sa durabilité.
Dans de nombreux cas, le troisième fil provient d'un tachymètre. La tension émise par ce tachymètre est souvent de 12V, ce qui signifie qu'elle ne sera pas directement acceptable par les entrées d'un microcontrôleur comme l'Arduino, qui opère généralement avec des tensions de 3.3V ou 5V. Il devient donc nécessaire d'abaisser cette tension pour la rendre compatible avec l'Arduino, tout en protégeant ses entrées sensibles. Une méthode courante consiste à utiliser une diode Zener pour limiter la tension à un niveau sûr, par exemple 4.3V. Cependant, il est important de noter que la sortie tachymètre de nombreux ventilateurs fonctionne en "collecteur ouvert". Dans ce scénario spécifique, la diode Zener peut s'avérer inutile car le circuit du ventilateur lui-même limite la tension de sortie.
Il est également avancé que la vitesse d'un ventilateur à trois broches peut être variée de la même manière qu'un ventilateur à deux broches, suggérant que le contrôle de la vitesse est principalement géré par la modulation de largeur d'impulsion (PWM). D'autres sources mentionnent un pilotage de la vitesse par rapport cyclique de l'alimentation, ce qui renforce l'idée que le PWM est la méthode privilégiée.
Le contrôle PWM est une technique puissante pour faire varier la vitesse d'un ventilateur. Il consiste à allumer et éteindre rapidement le ventilateur, en ajustant le rapport entre la durée de l'état "allumé" et la durée totale du cycle. Ce rapport, appelé "rapport cyclique", détermine la tension moyenne appliquée au ventilateur, et par conséquent sa vitesse.
Cependant, l'application directe du PWM sur une sortie numérique d'un Arduino présente des subtilités. Une sortie numérique d'un Arduino est intrinsèquement binaire : elle peut être soit à l'état haut (5V ou 3.3V selon la carte) soit à l'état bas (0V). Bien que cela semble parfait pour allumer ou éteindre un ventilateur, il est crucial de comprendre que les sorties d'un Arduino sont limitées en courant. Elles sont conçues pour envoyer des signaux de contrôle, pas pour alimenter directement des périphériques gourmands en énergie. Le courant maximal qu'une sortie peut délivrer est généralement limité à 40 mA, ce qui est souvent insuffisant pour un ventilateur. Un ventilateur typique, même de petite taille, peut nécessiter un courant de plusieurs dizaines, voire une centaine de milliampères (par exemple, un ventilateur de 0.38W sous 5V consomme environ 76 mA).
Par conséquent, il est impératif d'utiliser un composant intermédiaire capable de gérer le courant nécessaire au ventilateur, tout en étant contrôlé par le signal PWM de l'Arduino. Plusieurs solutions s'offrent à cette fin :
Transistor Bipolaire NPN : Un transistor bipolaire NPN, comme un BD139, peut fonctionner comme un interrupteur dans son régime de saturation. Dans cet état, il permet ou bloque le passage du courant entre son collecteur et son émetteur. La base du transistor est reliée à une sortie Arduino via une résistance, qui limite le courant entrant dans la base pour commander le transistor. L'avantage de cette méthode est l'absence de "clic" mécanique et une usure moindre par rapport à un relais.
Transistor MOSFET : Similaire au transistor bipolaire, un MOSFET (Metal-Oxide-Semiconductor Field-Effect Transistor) peut également servir d'interrupteur électronique. Un petit MOSFET, tel que le BS170, est souvent mentionné comme une option viable pour contrôler la puissance d'un ventilateur. Il est important de noter que si le microcontrôleur fonctionne à 3.3V, la tension de sortie des broches pourrait ne pas être suffisante pour faire basculer certains MOSFET. Dans de tels cas, une configuration avec deux transistors peut être nécessaire.
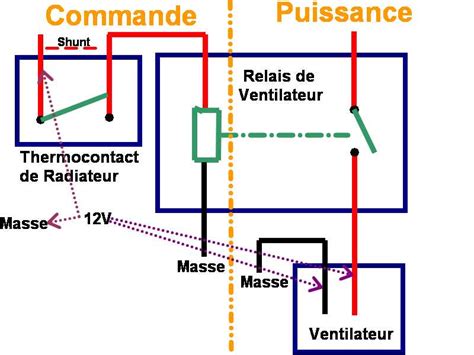
Module Relais : Un relais électromécanique permet d'ouvrir ou de fermer un circuit électrique de puissance en réponse à un signal de commande. Les circuits de puissance et de commande sont généralement isolés, ce qui offre une grande flexibilité quant aux caractéristiques d'alimentation. Un module relais, contrôlé par une sortie digitale de l'Arduino, peut être utilisé pour commuter l'alimentation du ventilateur. Bien que simple à mettre en œuvre, cette solution implique un mécanisme mécanique qui peut générer un léger bruit ("clic") et s'user avec le temps.
Lors de l'utilisation du PWM avec un Arduino, il est important de considérer les capacités de ses timers internes. Les timers sont les composants matériels qui génèrent les signaux PWM. L'Arduino UNO, basé sur le microcontrôleur ATmega328, offre différentes fréquences PWM sur ses broches. Les broches D3, D9, D10 et D11 sont généralement capables de générer une fréquence PWM de 31 kHz, qui est une norme courante et bien adaptée aux ventilateurs. Bien que 31 kHz ne soit pas une obligation stricte, c'est une fréquence qui fonctionne généralement bien.
Il est à noter que chaque ventilateur peut réagir différemment au contrôle PWM. Un ventilateur à 4 fils, par exemple, peut continuer à tourner même avec un rapport PWM de 0%, tandis que ce ne sera pas le cas pour un ventilateur à 2 ou 3 fils. Cela souligne l'importance de l'expérimentation pour trouver le rapport cyclique minimum qui permet au ventilateur de démarrer et de fonctionner de manière stable.
Pour éviter un manque de tension qui pourrait empêcher le démarrage du ventilateur, il est recommandé de ne pas descendre en dessous d'un certain seuil de rapport cyclique. Une valeur de 30% du cycle, ce qui correspond à une tension moyenne minimale de 3.6V sur une alimentation de 12V, est souvent suggérée comme point de départ pour assurer un démarrage fiable. Le PWM, contrairement à une simple baisse de tension, permet de conserver le couple du ventilateur, facilitant ainsi son démarrage.
Il est également possible que la broche PWM d'un ventilateur à 4 fils soit laissée en l'air, ce qui entraîne son fonctionnement à vitesse maximale. Pour éviter cela, l'ajout d'une résistance de 10 kΩ entre la broche PWM et la masse (GND) peut être une solution.
Pour contrôler un ventilateur à 2, 3 ou 4 broches en PWM avec un Arduino, un code spécifique peut être écrit. Ce code permet de définir la broche utilisée pour le PWM (par exemple, la broche D3) et d'ajuster la vitesse en modifiant une constante dans le programme. Pour les ventilateurs à 4 broches, une broche supplémentaire (par exemple, D2) peut être configurée pour recevoir le signal du tachymètre, permettant ainsi de mesurer la vitesse de rotation du ventilateur en utilisant les interruptions de l'Arduino.
Voici un exemple de structure de code qui pourrait être adaptée :
// Définir la broche PWM pour le contrôle du ventilateurconst int fanPin = 3;// Définir la broche pour le retour tachymètre (ventilateur 4 fils uniquement)const int tachPin = 2;// Variable pour stocker la vitesse du ventilateurint fanSpeed = 0;void setup() { // Initialiser la broche PWM en sortie pinMode(fanPin, OUTPUT); // Initialiser la broche tachymètre en entrée (si utilisée) pinMode(tachPin, INPUT); // Initialiser la communication série pour le débogage (optionnel) Serial.begin(9600); // Configurer le timer pour générer le PWM à la fréquence désirée // Ceci peut varier en fonction de l'Arduino et de la version de la librairie // Pour ATmega328 (Arduino UNO): // Timer2 peut être configuré pour 31kHz PWM sur D3 et D11 // TCCR2B = TCCR2B & 0b11111000 | 0x01; // Définir le prescaler à 1 pour 31kHz}void loop() { // Exemple : faire varier la vitesse du ventilateur de 0 à 255 (valeur PWM) for (fanSpeed = 0; fanSpeed <= 255; fanSpeed += 5) { analogWrite(fanPin, fanSpeed); delay(50); // Délai pour observer le changement de vitesse } for (fanSpeed = 255; fanSpeed >= 0; fanSpeed -= 5) { analogWrite(fanPin, fanSpeed); delay(50); } // Si vous utilisez le retour tachymètre, vous pourriez lire la vitesse ici // et ajuster fanSpeed en conséquence pour maintenir une température par exemple. // Par exemple, en utilisant une interruption pour compter les impulsions du tachymètre.}// Fonction d'interruption pour compter les impulsions du tachymètre (si applicable)// volatile unsigned long pulseCount = 0;// void countPulses() {// pulseCount++;// }Il est crucial de noter que chaque ventilateur est différent et que l'expérimentation sera nécessaire pour déterminer les plages de fonctionnement optimales. La puissance d'un ventilateur de PC est généralement faible, quelques watts, et si le transistor est correctement saturé, sa tension Vce (tension collecteur-émetteur) sera de 50mV au maximum, ce qui indique une faible dissipation de puissance.
Le choix du ventilateur ne doit pas se limiter à ses spécifications techniques, qui sont souvent mesurées dans des conditions idéales (dans le vide, sans résistance à l'air). Le flux d'air généré par un ventilateur est intrinsèquement lié à son rapport taille*vitesse. Un ventilateur plus grand tournant plus lentement peut déplacer autant d'air qu'un petit ventilateur tournant très vite.
Lors du montage, il est essentiel de s'assurer qu'aucun obstacle ne se trouve à proximité des pales du ventilateur, surtout dans les zones où la vitesse de l'air est la plus importante. Cela pourrait non seulement réduire l'efficacité du refroidissement mais aussi endommager le ventilateur ou créer des nuisances sonores. Des carters de protection peuvent être utilisés pour canaliser le flux d'air et réduire le bruit, améliorant ainsi l'expérience globale. Par exemple, des mesures ont montré qu'un système de refroidissement modifié avec des carters pouvait réduire le bruit de plusieurs décibels par rapport à une configuration d'origine.
En résumé, le contrôle d'un ventilateur à trois fils avec un Arduino est une tâche réalisable qui demande une compréhension des signaux PWM, des limitations des sorties Arduino, et des solutions matérielles pour l'amplification de courant. En choisissant les bons composants et en adaptant le code, il est possible d'obtenir un contrôle précis et efficace de la vitesse de rotation des ventilateurs pour diverses applications. L'expérimentation reste la clé pour optimiser les performances en fonction des caractéristiques spécifiques de chaque ventilateur.
tags: #ventilo #3 #fil #controle #par #arduino
